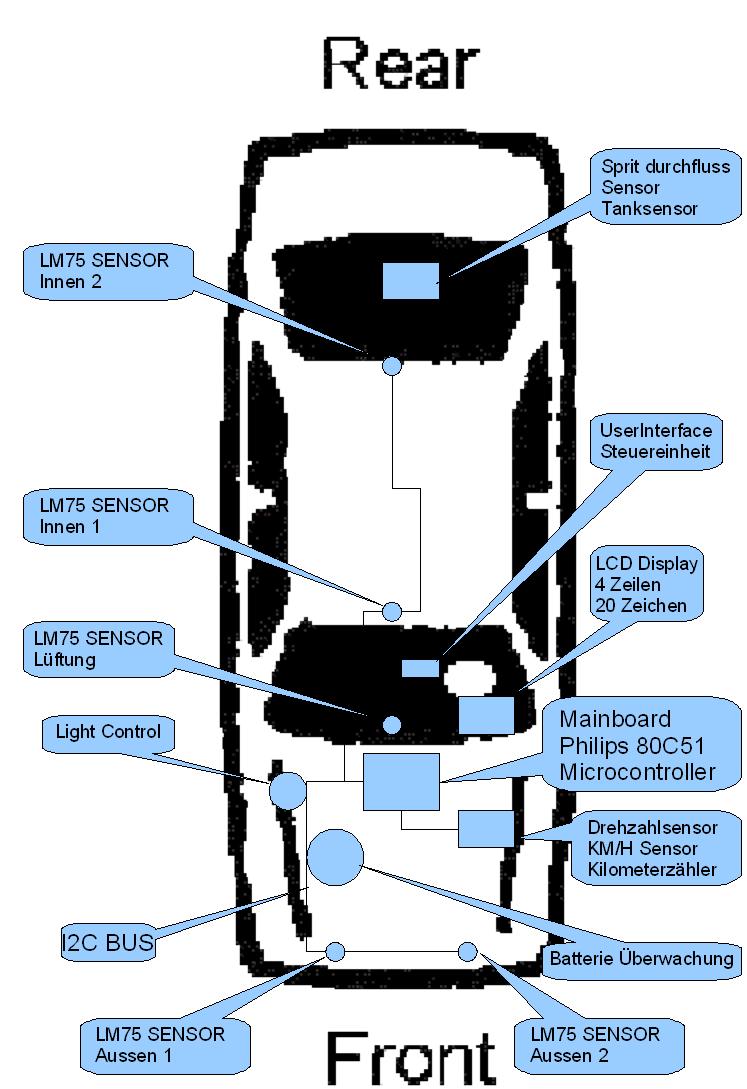
Arch MotiveControl
Die MotiveControlArchitektur ist nicht gleich die Architektur eines CPU's!
Zur Kommunikation wird der I2C Bus verwedet, nicht der CAN Bus. Das hat den Grund, da I2C einfacher für mich ist. An dem Bus hängt ein Master drann, der Microcontroller, der das ganze System steuert (in der Hand hält). Damit ich mit dem I2C Bus solche längen realisiren kann, verwende ich verdrilte und Geschirmte Kabel her. Um mit dem Bus keine Wege doppelt zurücklegen muss verwende ich für Stichleitungen einen I2C Switch.